
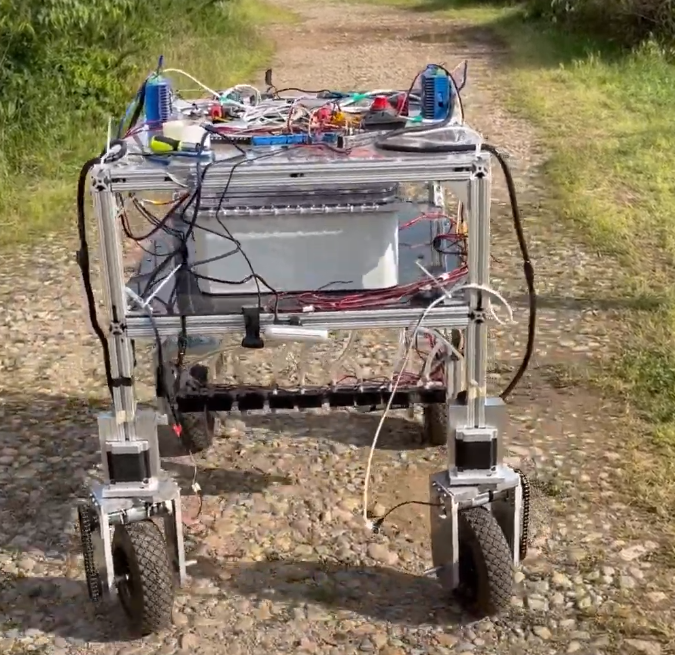

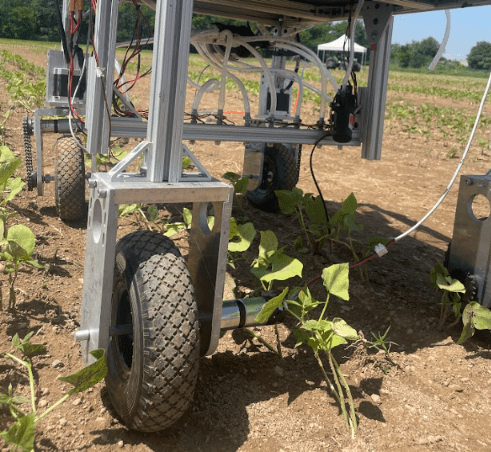
UBC Agrobot Farming Robot
Designed an embedded solution for navigation and control of a farming robot using sensors including LiDAR, Depth Camera, and IMUs. Developed motor controller interface and manual control system. Researched computer vision algorithms and implemented them using OpenCV.
Remote / Auto Tracking Camera Robot
Developed the motor controller for stepper and DC motors, and the web application.
Dancing Entertainment Robot
Developed a toy robot with an LCD screen and multiple motors that can be controlled by buttons and a web interface using RP2040, CircuitPython, Flask and AWS.

Autonomous Racing Simulation
Developed a platform for multiple teams to test autonomous driving software by racing each other using Unity, C#, Node.js, Express.js, JavaScript.

Mini Autonomous Racing Car
Built a 1/10 scale autonomous car controlled by an Nvidia Jetson Nano using an RC Car. Developed a Python library for easy control of the car.
Machine Learning Without Libraries
Implemented common ML algorithms with python and swift without using any third party machine learning libraries. Added iPython notebook tutorials. Numpy and some plotting libraries are used.
ItemHunt Education Technology Solution
Conceptualized a scavenger hunt style activity in which students answer questions by finding objects in real life and taking pictures of these objects. A machine learning model verifies the answers. Built an iOS app using Swift and Firebase, published to the Apple App Store. Developed a web application for teachers to prepare quizzes using HTML, CSS, Javascript and bootstrap.
